


中科院研发了一种下肢康复机器人,实现了下肢康复机器人的实时自适应步态调整

本文转自公众号:医休NNR
大家好,我是康复哥,近日中国科学院大学人工智能学院的一组研究人员开发了一种下肢康复机器人。该机器人采用了一种新颖的人机交互力测量方法,显著提高了步态训练的安全性和有效性。

该研究中介绍到:虽然康复机器人已经存在了一段时间,但最近技术上的进步正在突破其有效性的界限。传统的康复机器人通常使用固定的步态模式,可能并不适合所有患者,特别是那些肌肉力量尚存的患者。北京理工大学团队开发的新型机器人代表了对这种模式的重大转变。
它根据用户的意图和身体能力实时动态调整步态,这是一种与常用的被动方法完全不同的方法。研究团队与中国科学院大学、中国科学院自动化研究所等机构合作,设计了一款配备先进传感器和控制系统的机器人。这些技术共同监测患者运动产生的力量,使机器人能够提供精确和自适应的支持。
该机器人的关键创新在于其自适应步态训练能力。它使用面对面安装的悬臂梁力传感器来检测患者施加的细微力量。这些数据有助于动态模型实时调整机器人的动作,从而提高训练过程的响应能力和有效性。
大量测试验证了该设计,表明该机器人可以通过适应患者的肌肉输入来显著改善训练体验。这种适应性有助于防止肌肉萎缩并提高整体康复效果,使该机器人成为专业康复服务有限的地区的理想工具。
下文中,我们将该文献用翻译软件进行翻译,进一步的为大家介绍该款产品,希望能为大家带来帮助,因为是机器翻译,可能会有语法问题,如果对内容有严格要求的小伙伴,建议查看原文件。关注公众号后,在“医休NNR”公众号后台内回复“8026”免费领取原文件。
研究背景
近年来,由于人口老龄化和各种疾病的影响,下肢运动障碍患者的数量逐渐增加。传统的康复训练主要依赖于医疗和护理人员的辅助,效果受限于所需的专业能力和支持人员的数量。此外传统康复训练在偏远和欠发达地区难以普及,难以广泛满足运动障碍患者的训练需求。随着机器人技术的发展,康复训练机器人应运而生,并受到越来越多的关注。市场上已经出现了许多成熟的产品。
例如,Parker Hannifin公司开发的Indego可穿戴下肢外骨骼,用于偏瘫或脊髓损伤患者的步态康复训练。北京大爱机器人有限公司开发的Ailegs机器人能够提供自然步态训练,以恢复患者的肌肉运动和平衡能力。Auto LEE作为一种具有10个自由度的自平衡下肢外骨骼也被开发出来。此外,三星推出了GEMS系列外骨骼,Technaid公司推出了第三代机器人Exo-H3,并具备更智能的手机APP控制功能。这些进展有效扩展了下肢运动障碍患者康复训练的可能性和可及性。
对于下肢运动障碍患者来说,他们的下肢肌肉往往虚弱或无法主动收缩。康复训练机器人可以为患者提供辅助支持和力量,通过重复行走等训练,帮助预防肌肉萎缩,并最终恢复部分或全部肌肉功能。
早期的康复机器人通常采用被动训练控制策略,例如由Ekso公司开发的Ekso GT外骨骼机器人,通过模仿人体行走对患者进行被动训练。一些外骨骼机器人如Indego配备了姿态传感器,可以根据移动姿势改变被动运动状态。然而,被动训练方法无法为患者提供个性化训练,康复训练的参与度和舒适度因人而异。
事实上,大多数下肢运动障碍患者仍然保留了一定的残余肌力,完全的被动训练效率不高,因为它无法充分利用患者的残余肌力。为提高患者参与康复训练的积极性,外骨骼机器人应能够感知患者的意图,并在康复训练期间与患者进行更好的互动。一些研究人员采用了肌电图(EMG)或脑电图(EEG)信号来感知患者的运动意图。
例如,Sun等人利用表面肌电图预测膝关节运动意图,并实时调整康复训练动作。Li等人提出了结合EMG和EEG的康复外骨骼爬楼动作调整方法。Gordleeva等人提出了一种结合EEG和EMG的多通道信号处理方法用于康复机器人。
然而,使用EEG和EMG信号要求高精度和高稳定性的采集,这导致了复杂的采集设备。近年来,一些基于神经网络的方法被提出,用于处理康复机器人视觉信息及其他信号,从而调节步态相位、关节角度和关节扭矩。
然而,这些方法往往只关注预测机器人的姿态,缺乏对患者自身运动意图的强感知性。因此,一些研究通过采用基于位置的阻抗控制或基于力的顺应控制来实现主动运动模式,从而研究了人机交互。然而,在步态训练轨迹固定的被动康复训练中,患者的主动参与度有限。
为解决这一问题,动态微调步态在整个康复训练中的重要性不可忽视。Xu等人将动态运动原型(DMP)耦合模型集成到镜像疗法中,通过阻抗模型管理受影响腿的训练轨迹,并通过强化学习进一步完善耦合的DMP模型,以增强步态轨迹的适应性。同时,Ma等人引入了一种创新的在线步态规划方法,利用有限状态机模型,通过基于重心转移的模型动态识别关键步态点。
进一步地,Xu等人改进了轨迹变形算法,并结合基于交互扭矩估计的辅助控制器,最终改善了步态适应性。更普遍的是,许多研究将顺应控制策略集成到被动训练轨迹中,以实现步态的瞬时调整。Zhu等人提出了一种滑模顺应控制方法,以跟踪人体位置,使下肢康复机器人能够更准确地跟随腿部运动。
Wang等人应用了一种基于正向动力学的阻抗控制方法来预测步态,并在计算机模拟中取得了某些成果。与肌电信号不同,交互扭矩的直接测量更简单可靠。然而,在顺应控制过程中,往往忽视了患者之间以及步态周期不同阶段的差异,导致残余肌力在个体和运动阶段之间的利用不一致。
基于上述观察,本研究提出了一种通过引入顺应控制方法框架下的人腿动力学的自适应步态调整方法。结合主动和被动驱动模式,开发了一种新型下肢康复机器人系统,其髋关节和膝关节各具有一个主动自由度,而腰部和踝关节各具有一个被动自由度。更重要的是,采用了两个面对面安装的悬臂梁力传感器来测量人机交互力。
随后,基于拉格朗日方法,构建了所开发的康复训练机器人系统的人机交互动力学模型,以估算完全被动状态下的人腿驱动力。进一步地,考虑到人腿动力学和残余肌力,提出了一种基于顺应控制的自适应步态调节方法,实现了下肢康复机器人的实时自适应步态调整。最后,通过实际的交互实验验证了所开发的康复训练机器人系统及所提出的控制方法的有效性,有效提高了康复训练的安全性和便捷性。
结构与设计
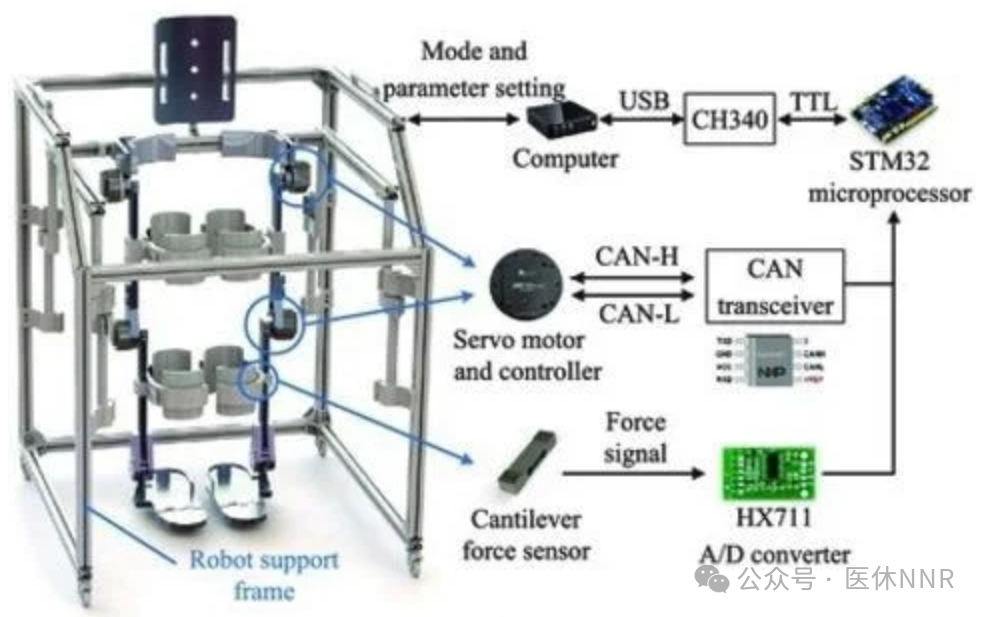
机电设计开发的下肢康复训练机器人由主机器人主体和辅助支撑框架组成,如图1所示。机器人主体由髋关节、膝关节、踝关节、连接杆和绑带组成,总重量为22.5公斤。辅助框架由铝合金型材制成,长1米,宽1米,高1.2米。与支撑框架配合使用时,机器人能够分担用户的一部分重量。为了将患者与下肢康复训练机器人连接起来,使用了绑带,因此机器人可以有效地驱动患者的运动,同时患者的肌肉也会产生力来影响人机交互。机器人的每一侧均包含两个位于腰部和踝部的被动自由度,如图1A所示。腰部自由度确保了腿部在冠状面内自由摆动,而踝关节自由度允许脚在前后平面内摆动。如图1A所示,这两个主动自由度由电机驱动,每个电机驱动一个自由度。髋关节驱动电机安装在腰部支撑上,并牢固地固定在腰部以使大腿摆动。膝关节驱动电机牢固地固定在大腿上,其输出法兰将电机旋转转化为小腿摆动。为了获得足够的连续扭矩,这些关节采用了RMD-X8pro电机(苏州麦克创机器人有限公司),额定功率为166W,经过1:9的行星减速器减速后,能够产生高达25N·m的瞬时扭矩。减速后,电机的峰值转速可达160 r/min,满足机器人康复训练步态周期的要求,即4到10秒。
此外,基于CAN(控制器局域网络)总线通信,所用电机的控制模式可以根据需要灵活选择位置模式、速度模式和力控制模式。每侧的两个被动自由度由弹簧驱动,以确保安全范围。人体踝关节是一个由胫骨、腓骨和踝关节面组成的球窝关节,提供了三个旋转自由度。踝关节的正确定位对于确保行走时脚与地面的良好接触至关重要[34]。为了确保安全的康复训练,机器人的踝关节被限制在前后平面内旋转。此外,利用弹簧连接的被动驱动方法可以满足训练要求。被动连接缓冲了踝关节,保护了患者的踝关节,并提供了足够的驱动力,使脚能够抬起和着地。
旨在收集交互力的传感器数据并实时调整电机的位置。图1B展示了整个控制过程。具体而言,康复训练机器人的设计控制器由计算机和STM32F103微处理器组成。采用了四组八个悬臂力传感器来测量康复训练机器人与患者之间的交互力,这些力通过A/D转换器(HX711,精密24位模数转换器)处理后发送到STM32微处理器。经过控制模块处理后,生成位置补偿量。微处理器通过CAN总线向四个电机发送8字节的实时位置指令。所采用的RMD-X8pro配备了电机控制器,根据实时指令控制电机位置。计算机可以修改步态数据和控制参数,并每100毫秒同步实时参数到基于STM32的控制器。
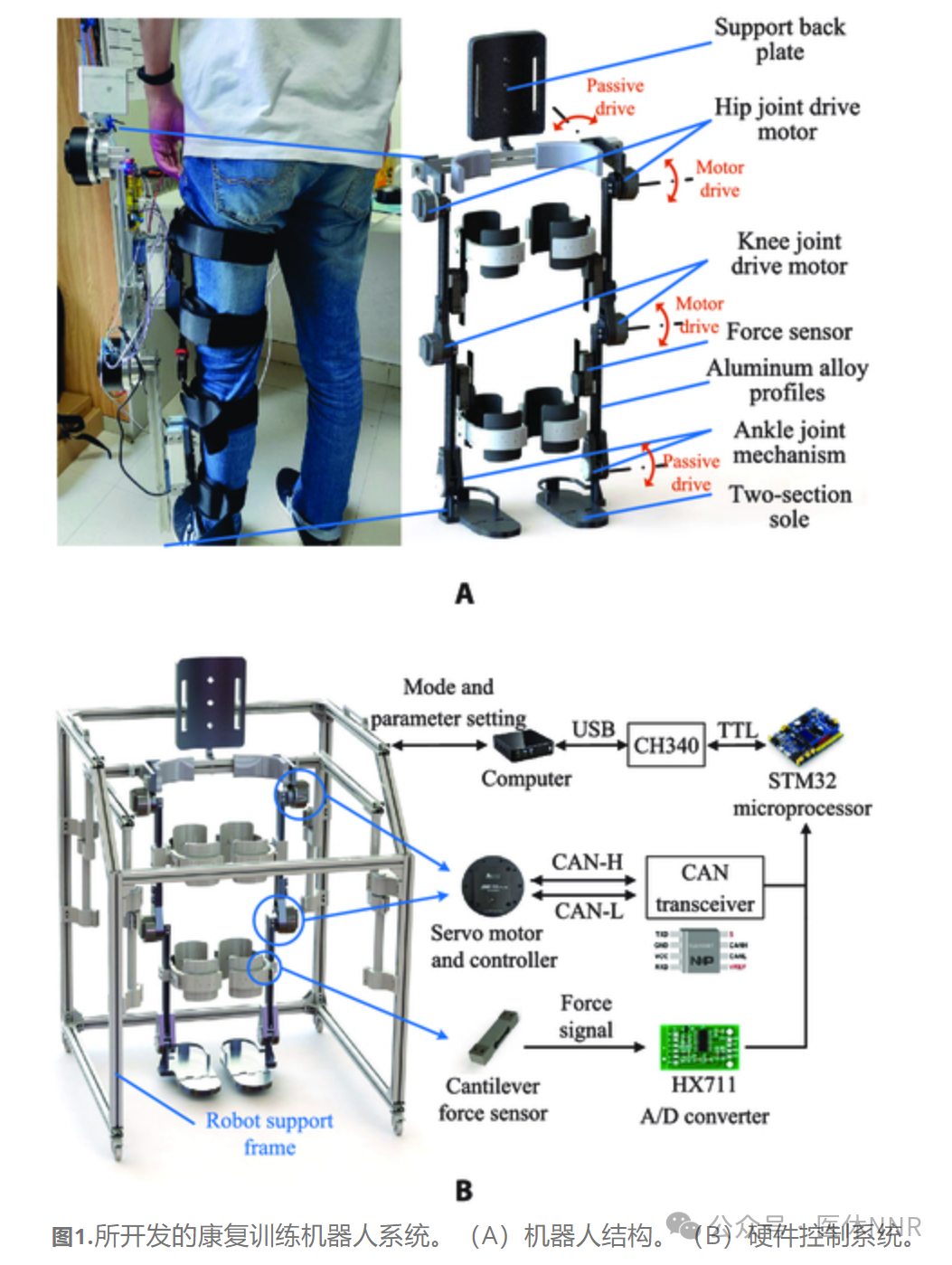
交互力测量为了测量人类与康复训练机器人之间的交互力,所开发的系统采用了8个悬臂梁传感器。这些传感器被策略性地分为4组,分别安装在左右两条腿上,负责测量每侧髋关节和膝关节的交互力矩。值得注意的是,机器人具有可调节高度的设计,为适应这一特点,传感器被固定在与测量关节相对固定的连接杆上。该设计确保了在适应不同身高的个体时,测量力臂的一致性。在每个测量位置,安装了2个悬臂力传感器,并且每个悬臂传感器的2个应变片呈面对面安装,如图2所示。悬臂梁的两端分别连接在机器人和腿部绑带上。因此,基于悬臂梁的变形,可以轻松获得腿部与机器人之间的交互力。
值得注意的是,有2个传感器反向安装,分别用于测量作用在前进和后退方向的单向力。因此,机器人与患者之间的交互力会导致2个相同的悬臂梁发生变形;因此,实际施加的力应为单个传感器测量值的两倍。在传感器安装过程中,施加了预张力,以确保传感器的初始值不为零。这种方法有效地避免了悬臂梁传感器在小值读数时观察到的非线性行为。此外,面对面安装的每个传感器的单独测量范围为20公斤。这种设计使传感器能够分担交互力的负担,从而即使在高传感器读数时也能避免非线性。将Fforward和Fbackward分别定义为传感器的前向力和后向力。考虑到上述因素,实际的交互力可以通过计算两侧测量结果的差值来获得。随后,可以根据以下公式计算单个关节的人机交互力矩:
(1)其中Tint为人机交互力矩;l为传感器的腿部连接端与关节之间的距离。
人机交互建模:
在本节中,将对所开发的康复训练系统进行人机交互动力学建模,这将为接下来的机器人系统性能评估和顺应控制器的构建提供坚实的基础。
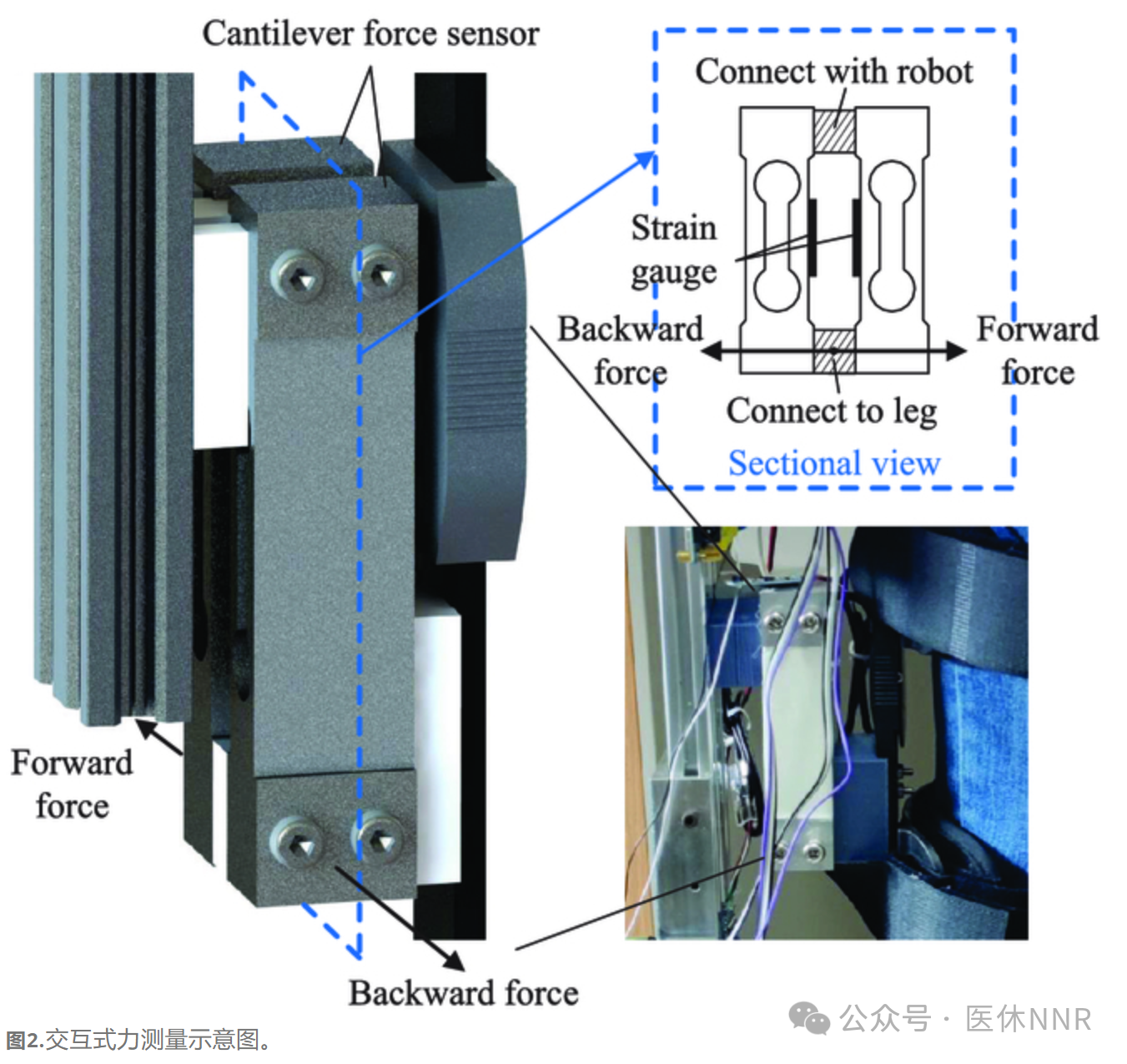
图3展示了人机耦合模型。具体而言,θ1和θ2分别表示机器人的髋关节和膝关节角度,而θ3和θ4则表示人腿对应的角度。定义Θ=[θ1,θ2]T为机器人的关节坐标向量。a1和a2分别表示大腿和小腿连杆的长度。在不考虑人腿参与的情况下,外骨骼被视为一个独立的系统,其力矩输出由关节电机产生。
定义Tr=[τ1,τ2]T为机器人的力矩输出向量。机器人大腿和小腿连杆的重量分别表示为m1和m2。假设每个连杆的质心位于连杆的中心。因此,这两个连杆的质心分别位于a1/2和a2/2的距离处。
下肢康复训练机器人的动力学模型基于拉格朗日方程构建。拉格朗日函数定义为系统的动能与势能之差,表达式为L=K−P,其中K和P分别表示系统的动能和势能。根据拉格朗日方法,可以很容易地得到下肢康复训练机器人的动力学模型,如下所示:(2)
其中,Tdis表示机器人系统的外部扰动,表示系统摩擦力,它与关节运动速度有关。M(Θ)是机器人的惯性矩阵,G(Θ)是重力矩阵,其表达式如下:(3)
在机器人系统中,除了重力的影响外,还存在机器人与人腿之间的交互力。为此,基于理论交互力估算方法[30],建立了人机耦合模型。在耦合模型中,电机作为动力源,而人腿不产生主动肌肉力量。因此,结合被动腿参与的拉格朗日方程可表示如下:(4)
其中,Th表示在人腿不施加肌肉力量时,对机器人系统产生的交互力矩。基于文献提出的人机连接刚度建模方法,假设在人腿和机器人之间存在一个固定的刚度连接。相应的运动关系如图3所示。人腿与机器人之间的交互力基于弹性关系建立,交互力的大小与人机连接的刚度和位移差密切相关。由于人和机器人之间的角度差异较小,因此力矩大小可以用刚度系数和变形来表示。(5)
其中,k为人体下肢与机器人之间的弹性系数,由机器人与腿的连接方式决定。显然,它的数值代表了系统刚度。
在实际应用中,通过精确模型或直接测量来计算由弹性产生的腿部驱动力矩是困难的。考虑到在被动训练模式下,人腿完全由机器人推动产生运动,我们将由绑带连接产生的交互力简化为驱动人腿运动的力量。为了解决这一问题,开发了一个动态模型,用于估算在没有肌肉力量的情况下,腿部的驱动力矩,并将腿部作为模型的主要关注点。(6)
其中,Mh为人类下肢的惯性矩阵,Gh为重力矩阵,ml表示理论上的小腿重量。
基于导纳控制的自适应步态训练方法
在人机耦合动力学模型中,关节电机提供驱动力矩,而腿部处于无肌肉力量的状态。然而,在实际康复训练中,需要考虑到人腿残余肌力的参与。没有残余肌力的训练是完全被动的。在被动训练状态下,当肌肉在与腿部运动相同的方向上产生力量时,机器人会限制患者的运动范围;否则,它将阻碍肌肉施加力量的能力。为了解决这个问题,引入了一个阻抗模型,用来描述康复训练机器人与人腿之间的关系,该模型利用人腿产生的力量对机器人进行顺应控制。(7)
其中,ΔΘ表示当前关节角度与目标角度之间的差异。Md、Bd和Kd是预设的导纳参数,分别表示康复训练机器人与人腿交互时的旋转惯量、阻尼和刚度矩阵。Tad=Tint−Th表示腿部残余肌肉力量的大小,即传感器收集的实际人机交互力矩与动力学模型理论力矩之间的差值。当人体肌肉施加力量时,实际交互力与理论值之间存在差异。为了顺应患者的运动趋势,可以根据方程(7)实时求解并调整关节位置和速度。显然,康复训练机器人的导纳特性代表了其跟踪人腿运动的能力。根据方程(7),在导纳控制模型中,输入为交互力Tint,输出为位置误差Δq。机器人系统表现出二阶特性,可以表示为:(8)
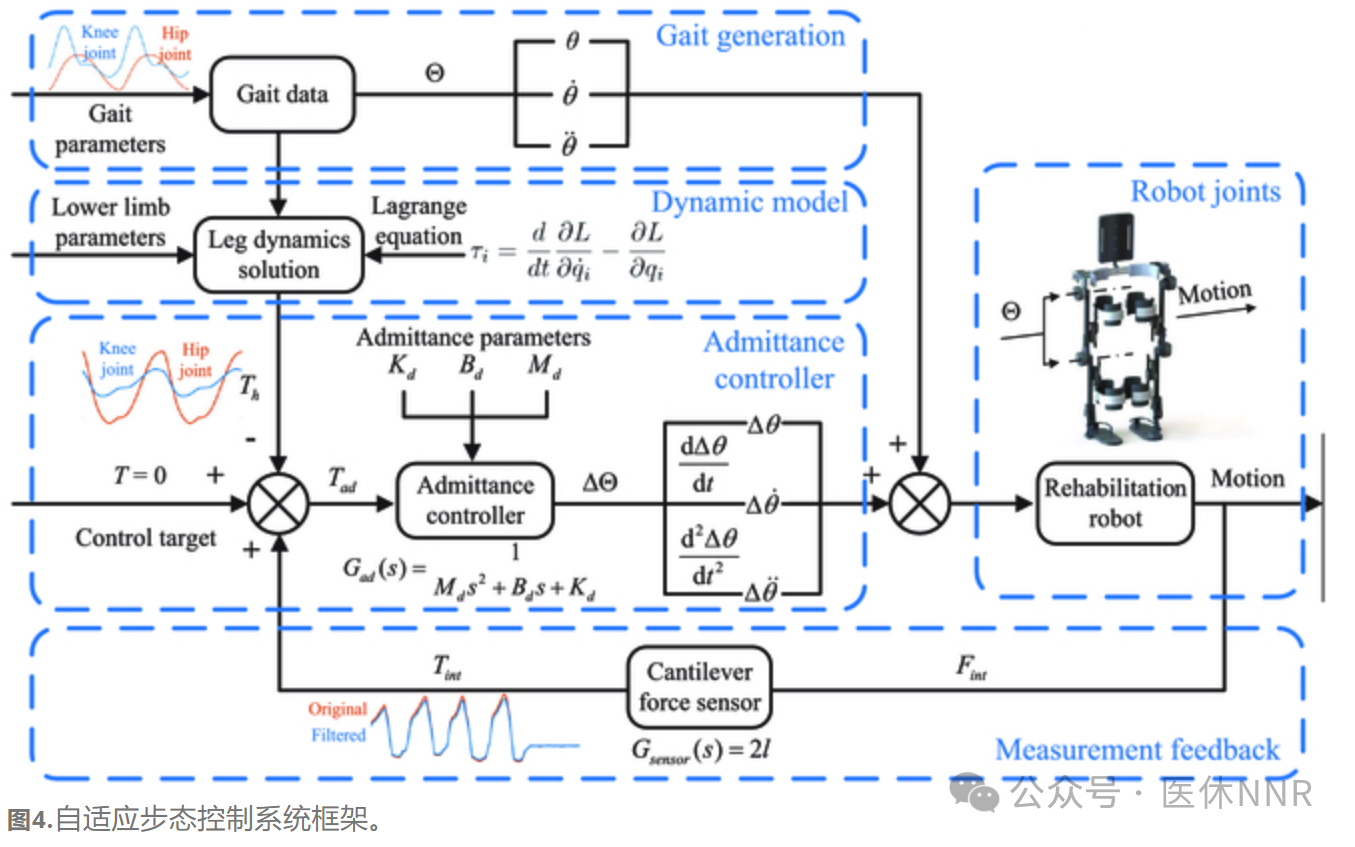
其中,ξ是阻尼比,ωn是系统的自然频率。通过修改导纳参数可以确保控制模型的稳定性。图4展示了基于导纳控制的开发康复训练机器人自适应步态训练的整个过程。在步态生成状态下,根据收集的步态数据,可以轻松获得关节角度状态Θ。随后,基于构建的人腿运动学和动力学模型,计算在没有任何肌肉力量的情况下的人机交互力矩Th。接下来,导纳控制器开始工作。
具体来说,输入控制目标设定为T=0。这意味着将人机交互力矩Th和Tint之间的差值完全用作导纳控制,以尽量减少机器人对人腿运动造成的阻碍。同时,导纳控制模块计算关节的实时角度调整量ΔΘ。这些计算结果与理论关节角度叠加以获得新的实时步态。在所采用的伺服电机作用下,这些新生成的步态可以由康复训练机器人轻松有效地执行。整个过程中,安装的悬臂力传感器将收集交互力并计算Tint以进行反馈。
试验结果
下肢步态数据采集
对于下肢康复训练机器人而言,无论采用何种控制策略,人的步态曲线都非常重要。只有具有适当的步态曲线,康复训练机器人才能更好地帮助患者恢复。在实际操作中,步态曲线的生成和稳定性测试尤为重要。
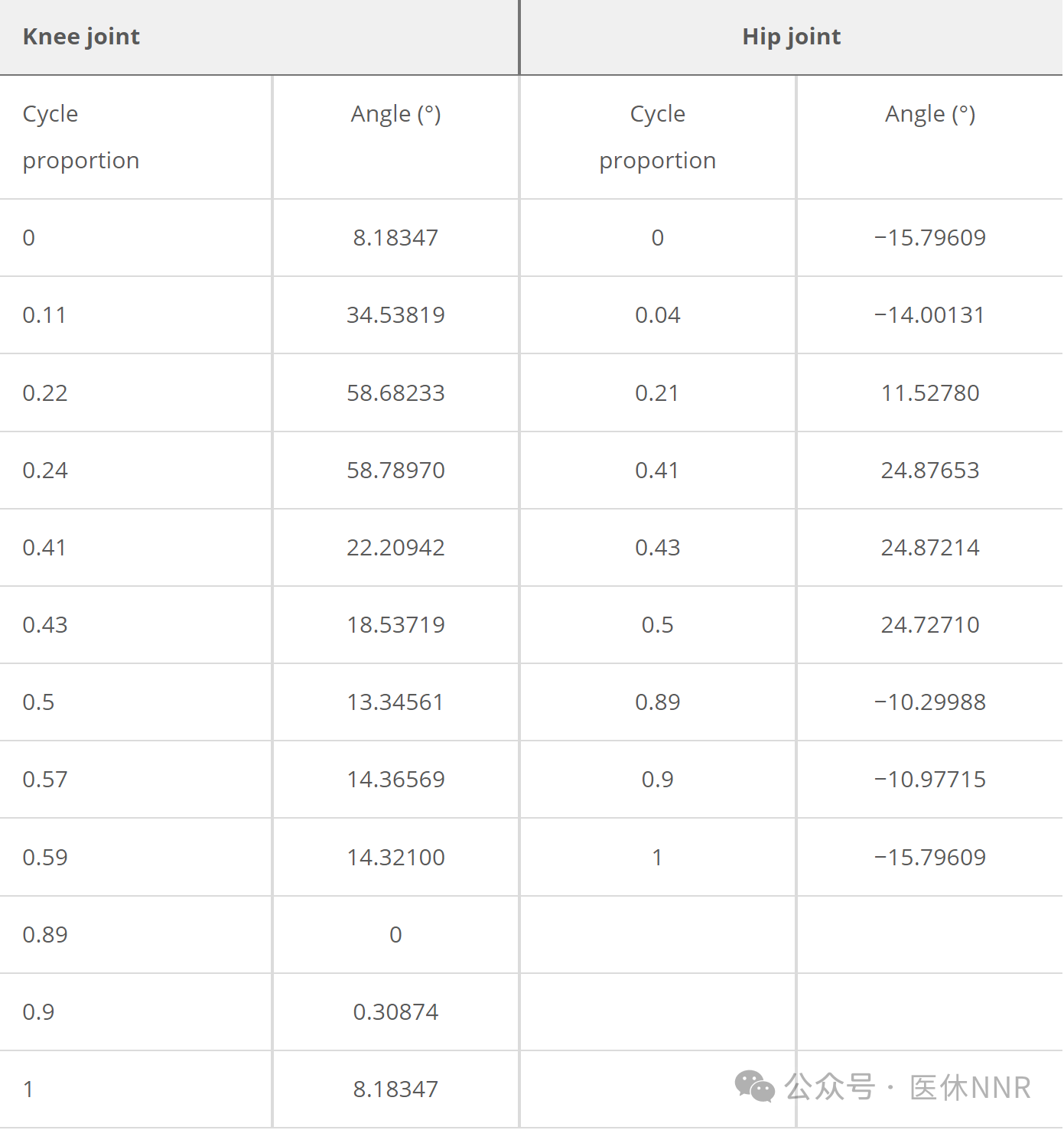
许多因素会影响步态曲线的提取,例如传感器的精度与稳定性以及环境干扰。因此,有必要对提取的步态数据进行滤波,以确保步态曲线的稳定性。按照现有的步态曲线生成方法,研究人员在每个关节的步态周期内,分别采集了髋关节的9个关键位置和膝关节的12个关键位置。表中列出了所收集的膝关节和髋关节的序列化位置。这些关键点在曲线变化率较大的位置更加密集,关键点的冗余性保证了生成步态的稳定性和平滑性。
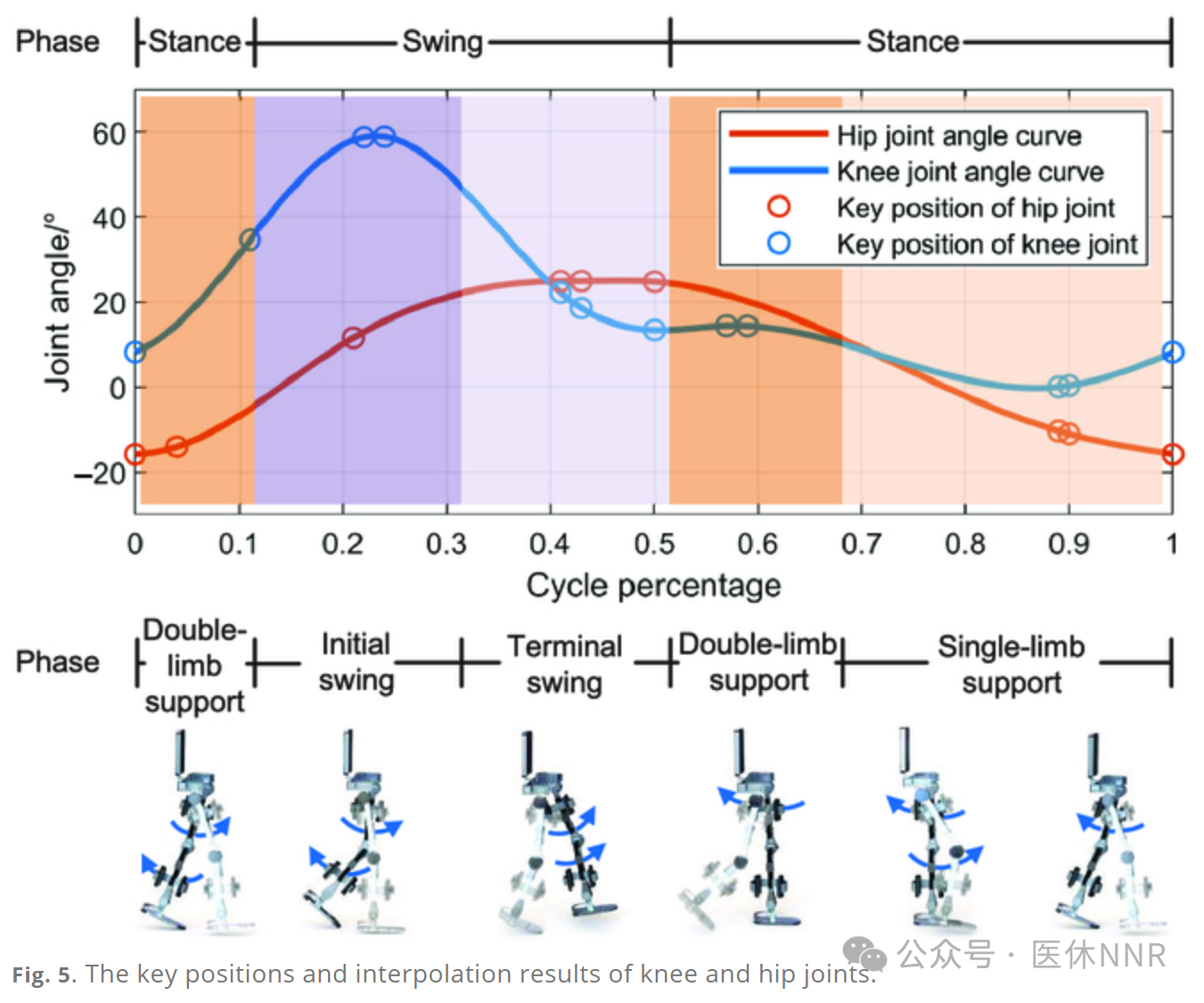
通过对这些采集的关节角度(即髋关节的9个位置和膝关节的12个位置)进行三次样条插值,可以获得最终的步态曲线,如图5所示。以左腿为例,可以从步态曲线中轻松观察到两个明显的阶段,即站立和摆动,分别用橙色和紫色背景颜色在图5中直观地表示。对于站立阶段,可以进一步分为单腿站立相和双腿站立相。当右腿向前迈步时,左腿过渡到单腿站立状态。随后,随着右腿着地,左腿转入双腿站立状态。至于摆动阶段,它由初始相和末期相组成。前者从左脚抬起时开始,后者从重心重新调整时开始。图5展示了整个过程的运动序列图,显示了相对平滑的运动模拟结果,从而为康复训练实验奠定了基本步态。
人机交互试验
以下实验聚焦于基于导纳控制方法的人机交互力测量和分析。根据患者腿部与康复训练机器人之间的交互信息,应用导纳控制来调节机器人的膝关节和髋关节位置,从而完成力-位置控制过程。根据公式(7),可以轻松建立交互力与关节角度之间的关系。同时,通过安装的悬臂力传感器,可以直接测量小腿与机器人之间的交互力。在此实验中,以左膝关节为实验对象。为了测试导纳控制方法的效果,我们固定了膝关节的步态曲线,并将输入的步态角度设为始终为0°,即Θ=0。膝关节的伺服电机在位置控制模式下运行,通过CAN总线接收位置命令。在导纳模型的计算中,我们以100 ms的周期以位置差分的形式处理一阶和二阶微分。
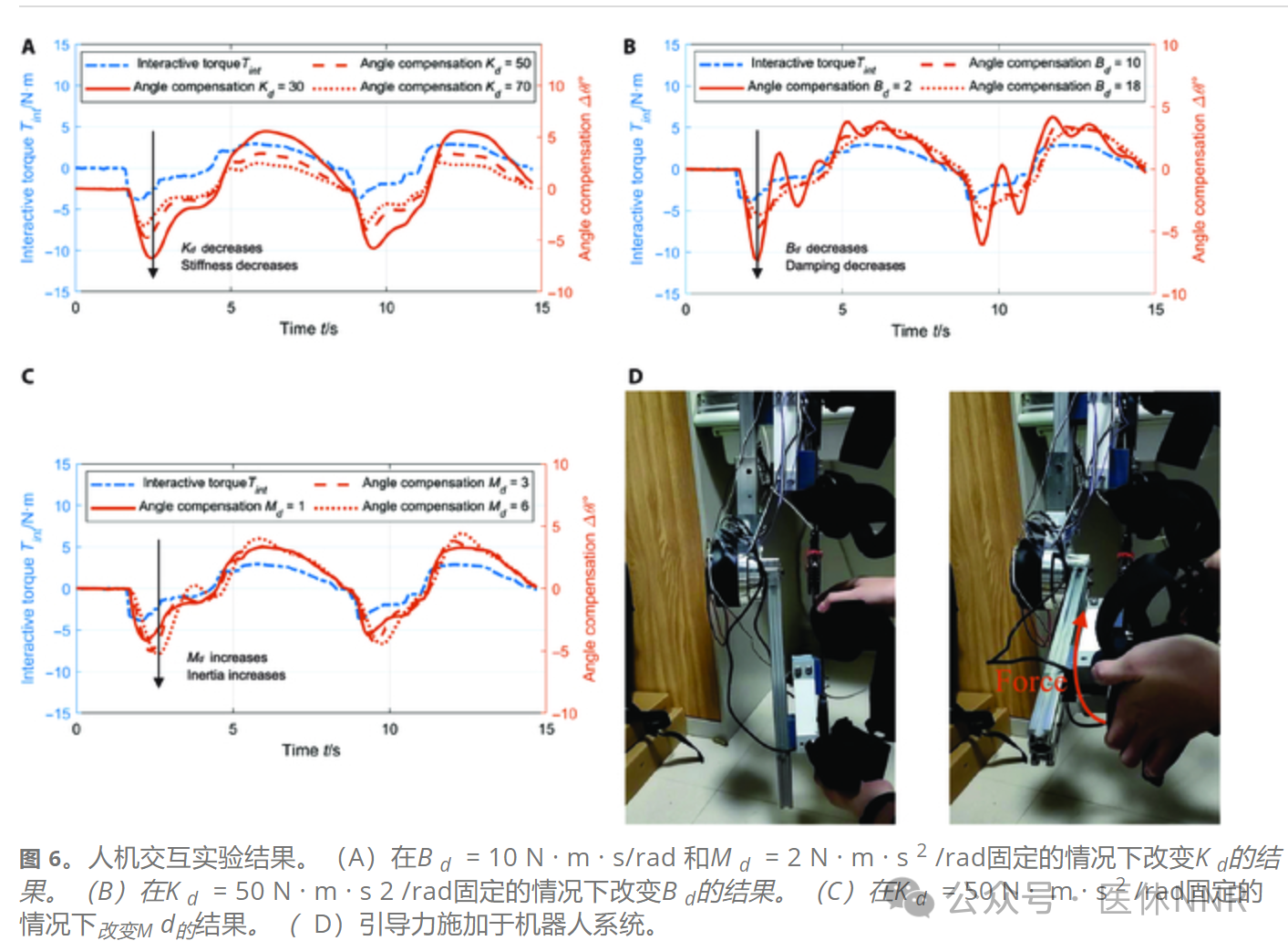
根据公式(8),可以很容易看出在导纳模型中,系统性能由一些关键参数决定,例如刚度系数Kd、阻尼系数Bd和惯性系数Md。通过改变这些关键系统参数,可以获得不同的角度补偿响应特性。因此,探索这些参数如何影响系统性能是非常重要的。图6展示了在不同关键参数下所构建的机器人系统的实验结果。更具体地说,首次测试在固定Bd=10 N·m·s/rad和Md=2 N·m·s²/rad的条件下,通过改变Kd进行,如图6A所示。可以发现,随着Kd的增加,角度补偿量明显减少。因此,适当地增加Kd以限制角度补偿范围对确保系统稳定性至关重要。图6B显示了在固定Kd=50 N·m/rad和Md=2 N·m·s²/rad条件下改变Bd的结果。可以发现,随着Bd的增加,系统响应变慢,但波动减少。因此,适当增加Bd可以防止关节在达到极限点时出现过冲,从而提高训练的安全性。在固定Kd=50 N·m/rad和Bd=10 N·m·s/rad的情况下,随着Md的增加,系统惯性增加,响应变慢,如图6C所示。在主动模式导纳控制中,跟踪误差通常作为参数选择的评估指标。在本研究中,我们采用导纳模型和人体动力学模型来实现被动训练中的轨迹自适应控制。因此,参数选择的目的是基于交互力调整被动训练轨迹模式,以最大限度地提高患者的参与度,同时确保安全性。根据实验结果,自适应康复步态控制系统的参数设定为Kd=50 N·m/rad、Bd=10 N·m·s/rad和Md=2 N·m·s²/rad。
导纳方法优化步态
在接下来的实验中,一位志愿者穿戴了开发的康复训练机器人进行测试。该志愿者身高180厘米,体重60公斤。根据文献中的人体参数估算方法,可以估算出志愿者的动态参数:大腿质量为8.5公斤,小腿质量为4.5公斤,大腿长度为0.37米,小腿长度为0.47米。同时,假设沿腿部的质量均匀分布。
首先,通过安装的悬臂力传感器可以收集在步行训练期间左膝关节两个方向上的交互力。在测试中,训练步态周期设置为4秒。图7A显示了在4个步行周期内收集的悬臂力传感器数据。由于安装误差、连接刚度和其他因素,所得的传感器数据表现出较差的稳定性。为补偿传感器测量引起的误差,采用卡尔曼滤波方法进行递归数据处理,从而增强信号的稳定性并减少传感器误差。数据处理后,获得了左膝关节在4个步态周期内的人机交互力矩,如图7B所示。特别是,蓝色和红色曲线分别表示滤波前后交互力矩的变化。
图7.测得的膝关节交互力和力矩。(A)小腿力传感器数据及滤波结果。(B)膝关节的人机交互力矩。
为了推导导纳方程,有必要计算在没有任何肌肉力量的情况下人腿的驱动力。为此,根据公式(6)建立了人腿的动态模型。通过在一个步态周期(4秒)内求解理论交互力矩Th,可以获得图8A中显示的两个关节力矩。这些结果在整个周期内是一致的,并且与文献中正常个体的步行力矩估算结果相似,证明了公式(6)中所构建估算方法的可行性。在实验条件下,分析了左膝关节交互力与导纳控制力之间的关系。
根据Tad=Tint−Th,可以获得左膝关节在4个周期内的Tad变化,如图8B所示。已知Tad是膝关节导纳控制中的系统力矩。由于志愿者在实验期间为健康个体,步行时通常有较大的主动肌肉力量,因此施加于康复训练机器人的Tint在没有肌肉力量的情况下大多与理论力矩Th相反。在这种情况下,导纳力矩Tad在与运动相同方向上对人腿进行了较大的补偿。根据公式(7),我们进行了微分计算以计算补偿角ΔΘ。结合上述人机交互实验结果,设定参数如下:Kd=50 N·m/rad、Bd=10 N·m·s/rad和Md=2 N·m·s²/rad。
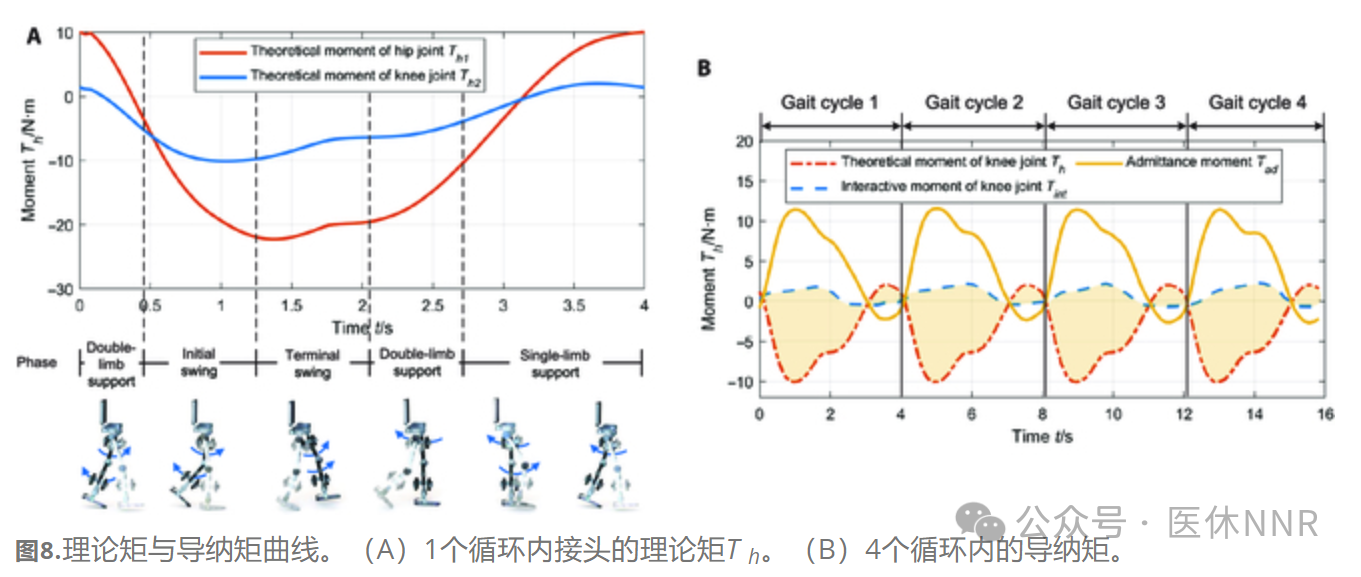
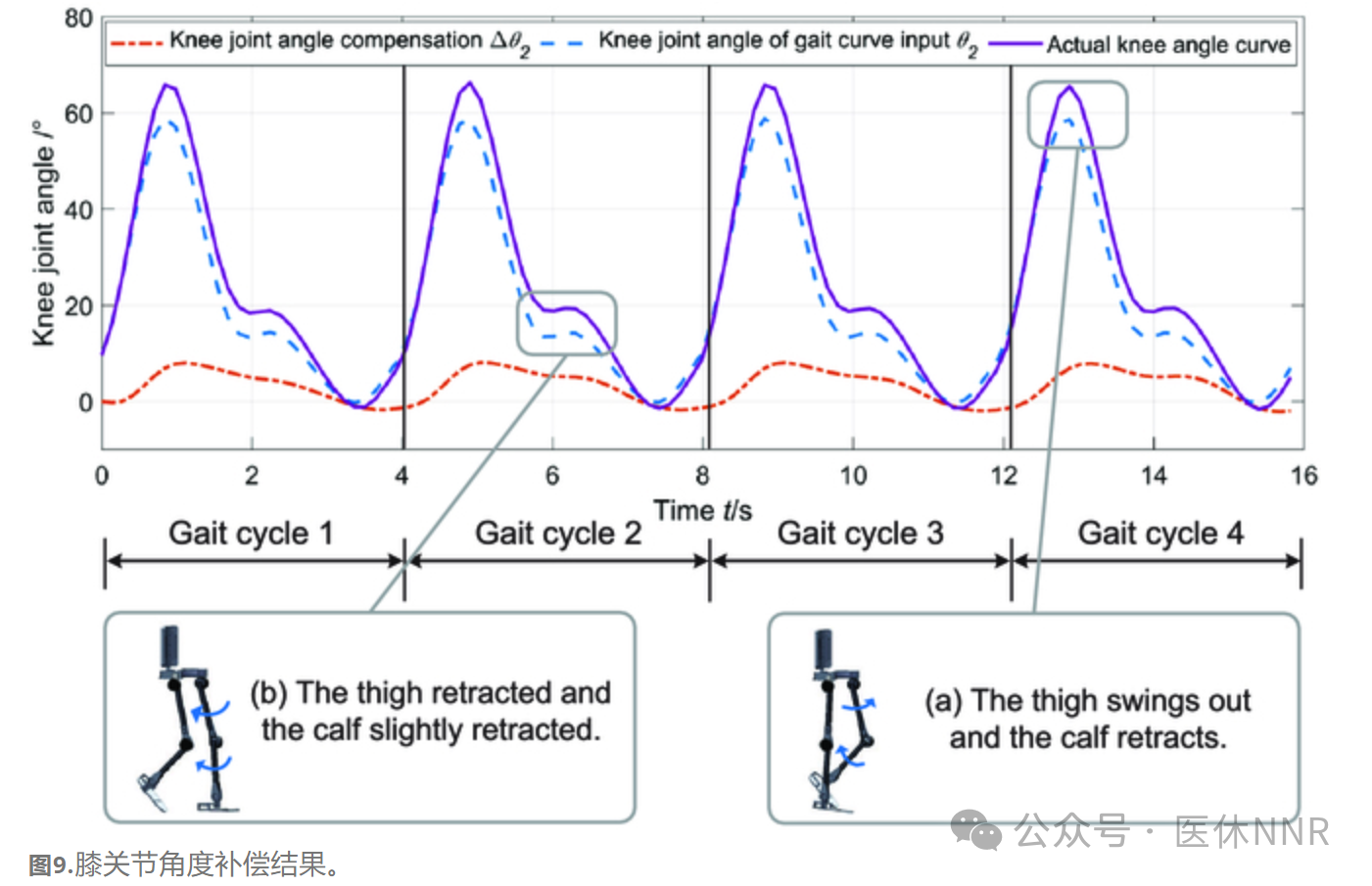
图9展示了实验中左膝关节的输入曲线和补偿结果。由于志愿者是健康个体,腿部肌肉力量使得前后运动提前于输入曲线发生。然而,导纳控制系统能够预测提前发生的运动并通过角度补偿调整步态曲线。最终,实时调整后的曲线中的关节运动范围更大,符合调整预期。
对研究结果的讨论
所提出的基于导纳控制的自适应步态训练方法考虑了人体腿部动力学,对于利用患者残存的下肢肌力具有显著优势。通过实时优化训练步态,这种开发的康复训练机器人能够有效提高患者的参与度和安全性,同时确保训练的有效性。
与文献中完全主动控制方法相比,自适应被动训练方法提供了更稳定的训练曲线,保证了安全性和稳定性。虽然现有的被动康复训练方法可以在训练过程中实现步态调整,但往往难以充分利用残存的肌肉力量。通过引入人体腿部动力学,所提出的训练过程能够适应不同个体和阶段,从而提高训练的参与度。在本研究中,我们利用人机动力学模型进行了交互实验,并估算了最佳导纳参数。随后,涵盖4个步态周期的康复训练实验展示了所提出的自适应步态方法的稳定性和有效性。
然而,由于依赖于基本步态模式以及当前10Hz的控制频率,限制了我们在康复训练期间准确获取和响应患者的其他运动意图,例如启动和停止步行动作。为了解决这个问题,应在基本步态模式中纳入更多种类的训练姿势。此外,患者的运动频率被设定为一个预设值,因此需要进一步探讨如何增强导纳控制参数的适应性,以适应个体在步行频率上的差异。通过增强康复训练机器人的步态适应能力,我们可以更好地定制训练方案,以满足每位患者的独特需求。
研究结论
本文开发了一种具有自适应步态调整能力的新型下肢康复训练机器人。为了获得关节交互力矩,所开发的下肢康复训练机器人使用了两个面对面安装的悬臂梁力传感器,以测量两个方向上的人机交互力。依靠拉格朗日方程,构建了一个人机交互系统的动力学模型,用以估算完全被动状态下的人腿驱动力。
因此,通过将理论力矩与传感器收集的实际关节交互力进行比较,可以获得人体腿部的残余肌力,并在处理由残余肌力产生的导纳力矩后,获得实时关节位置补偿角。在此基础上,提出了一种自适应步态调整方法,以实现适应穿戴者运动意图的目标。通过多项实验验证了所开发的下肢康复训练机器人。结果表明,基于导纳控制的自适应步态训练方法能够有效提高康复训练的参与度和安全性。
未来的工作将集中于分析康复机器人与患者之间步态周期的差异,细化机器人的步态速度以更好地适应患者的步行节奏,并进一步提升康复训练的安全性和参与度。
本文来源:Cyborg and Bionic Systems
精彩文章回顾
哈尔滨工业大学机器人实验室提出一种新型下肢外骨骼J-Exo,该机器人采用线性伸缩机构,可以帮助老年人爬楼梯和蹲下
什么样的算法可以让步态训练机器人帮助中风患者提供更有效的治疗?
经皮耳迷走神经刺激为中风患者上肢运动功能提供一种治疗的新方法
非侵入性疗法刺激脊髓,被证明可以改善SCI患者上肢力量!
本文2024-08-26 18:24:19发表“医休观点”栏目。
本文链接:https://www.yixiuqixie.com/article/306.html
相关文章






阅读排行
- 手慢无!10款已上市密网支架·最全参数对比
- 新源脑科学完成数千万元Pre-A轮融资,加速脑功能监测与神经调控产品落地
- 合珀生物完成数百万元天使轮融资,加速3D器官模型研发,助力革新药物研发进程
- 国家药监局关于暂停进口、经营和使用韩国杰希思医疗公司Nd:YAG激光治疗仪的公告
- 加速注射笔产能布局,英捷信医疗顺利完成数千万元A轮融资
- 健适医疗完成2500万美元战略融资,进一步增强企业产品研发能力和发展运营模式
- 靠大单品融资超13亿元,这家关节植入物制造商16年只做一个产品
- IVD新品:万孚、万泰、达安基因、东方生物、雅培等
- 全球唯一,外周支架革新产品在中国获批
- 基于运动想象范式,搭建独特算法,韶脑科技有望将脑卒中康复周期缩短1/3